Mando a distancia interno múltiple Comba MIRCU-S24

Prefacio
Este manual del usuario describe el uso básico de la antena basculante eléctrica conectada a la unidad de control remoto interno múltiple (MIRCU). Debido a diferentes equipos y actualizaciones de software, algunas descripciones en este manual pueden diferir del uso real. La información contenida en este documento está sujeta a cambios sin previo aviso.
Precauciones de seguridad
- Instalar letreros de seguridad en el sitio para que el público sepa que el área es peligrosa para el público; el personal operativo debe utilizar Equipos de Protección durante el trabajo.
- Preste atención a cualquier vol.tage cable alrededor durante la instalación, tenga cuidado y evite descargas eléctricas.
- Asegúrese de que la antena esté instalada en el ángulo de protección de la torre Pararrayos.
- Se debe instalar el cable de conexión a tierra, asegúrese de que la resistencia de conexión a tierra sea inferior a 5 Ω.
Encimaview
Propósito principal y ámbito de aplicación
MIRCU es un controlador para antena con inclinación eléctrica para realizar inclinación eléctrica remota. Cumple con los estándares AISG2.0 y AISG3.0, apto para usarse con todas las estaciones base Ericsson, Nokia, Huawei y ZTE AISG2.0 y AISG3.0.
Descripción del modelo
 Condiciones y entorno de trabajo normales
Condiciones y entorno de trabajo normales
- Temperatura ambiente: -40 ℃ a +60 ℃
- Fuente de alimentación: CC +10 V a +30 V
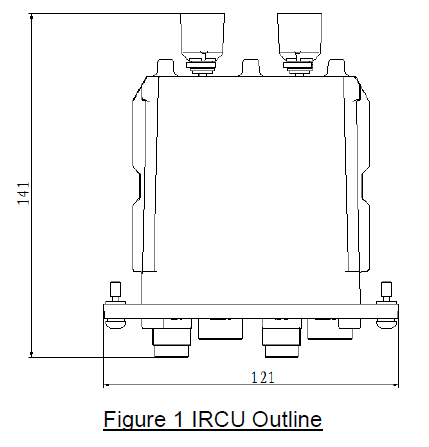
Dimensiones y peso
El esquema del MIRCU se muestra en la Figura 1 a continuación:
 El tamaño y el peso se muestran en la Tabla 1 a continuación:
El tamaño y el peso se muestran en la Tabla 1 a continuación:
| Modelo | Dimensiones (L × An × Al)/mm | Peso/kg (Aproximado) | Tamaño del paquete (L × W × H)/mm |
| MIRCU-S24 | 141x125x41 | 0.5 | 160 × 178 × 87 |
Tabla 1 Dimensiones y peso de la IRCU
Especificación MIRCU
- Para conocer las especificaciones de MIRCU, consulte la hoja de datos de MIRCU.
- Ángulo de inclinación MIRCU con precisión de ajuste de ± 0.1°.
Sistema RET y principio de funcionamiento
Sistema RET
El sistema de inclinación eléctrica remota múltiple (RET) consta de 2 partes principales, antena y controlador habilitados para inclinación eléctrica.
Principio de funcionamiento
MIRCU obtiene información de control o número de pulsos de rotación del motor durante la calibración. Al ajustar la rotación del motor de MIRCU, puede obtener el control de movimiento del cambiador de fase en una antena y, por lo tanto, puede controlar el ángulo de inclinación eléctrica de la antena. Mientras se mantiene la comunicación en tiempo real entre
MIRCU y PCU (Unidad de control portátil), PCU envía comando de control a MIRCU; MIRCU devolverá el resultado del control a la PCU, y la PCU actuará como interfaz Hombre-Máquina.
Principio de funcionamiento de 2 primarias
El módulo MIRCU-S24 tiene 2 pares de puertos AISG y admite el protocolo AISG3.0, y puede ser controlado por 2 primarias (estaciones base) que cumplen con el protocolo AISG2.0 o AISG3.0 al mismo tiempo. Los puertos AISG del módulo comparten la misma información de configuración y tienen el mismo número de serie.
Hay 2 motores dentro de MIRCU-S24, que actualmente pueden impulsar una antena de 8 frecuencias. En un futuro próximo, con el aumento de la complejidad de la demanda de antenas, el firmware se actualizará para admitir antenas de hasta 20 frecuencias, y se espera que esté listo para el segundo trimestre de 2.
Los 2 pares de puertos AISG no tienen diferencia en la función sino en la autoridad. El puerto AISG puede asignar cualquier banda, independientemente del AISG 1 o 2, siempre que la banda aún no esté configurada por otro puerto AISG.
Los números de serie del dispositivo que puede leer la estación base ASIG2.0 al escanear el módulo MIRCU-S24 son los siguientes: (permiso de acceso predeterminado)
 Cuando el permiso de acceso del dispositivo para el puerto se muestra como "Sin acceso", la estación base AISG2.0 no podrá escanear el dispositivo. El permiso de acceso del puerto se establece mediante el comando de configuración MALD como se define en el protocolo AISG3.0.
Cuando el permiso de acceso del dispositivo para el puerto se muestra como "Sin acceso", la estación base AISG2.0 no podrá escanear el dispositivo. El permiso de acceso del puerto se establece mediante el comando de configuración MALD como se define en el protocolo AISG3.0.
Por ejemploample, el módulo tiene 8 dispositivos y los permisos de acceso al dispositivo se establecen de la siguiente manera:
| RETIRADO | PROT1 | PUERTO2 |
| CB01CB20C1234567-Y1 | Leer y escribir | Sin acceso |
| CB02CB20C1234567-Y2 | Leer y escribir | Sin acceso |
| CB03CB20C1234567-Y3 | Leer y escribir | Sin acceso |
| CB04CB20C1234567-Y4 | Leer y escribir | Sin acceso |
| CB05CB20C1234567-R1 | Sin acceso | Leer y escribir |
| CB06CB20C1234567-R2 | Sin acceso | Leer y escribir |
| CB07CB20C1234567-R3 | Sin acceso | Leer y escribir |
| CB08CB20C1234567-R4 | Sin acceso | Leer y escribir |
Cuando la estación base AISG2.0 está conectada, el puerto 1 puede escanear a CB01CB20C1234567-Y1, CB02CB20C1234567-Y2, CB03CB20C1234567-Y3, CB04CB20C1234567-Y4, 4 dispositivos. El puerto 2 puede escanear a CB05CB20C1234567-R1, CB06CB20C1234567-R2, CB07CB20C1234567-R3, CB08CB20C1234567-R4, 4 dispositivos.
Los números de serie del dispositivo que puede leer la estación base AISG3.0 escaneando el módulo MIRCU-S24 son los siguientes:
 Funcionamiento en modo AISG2.0
Funcionamiento en modo AISG2.0
En la siguiente tabla se muestra un resumen del conflicto de operación para 2 primarias (1ra y 2da primaria) que operan MIRCU-S24:
**Nota: Todos los "√" y "X" que se muestran se relacionan principalmente con el segundo primario, lo que implica si la acción correspondiente (enumerada horizontalmente en la tabla) se puede realizar o no en el segundo primario cuando el primer primario está ejecutando un determinado comando o acción. (enumerados verticalmente en la tabla). El orden de prioridad del "principal" no es fijo y depende de qué primario realmente inicie una acción en primer lugar.
|
2nd Primario
1st Primario |
Escanear |
Calibración |
Establecer inclinación |
L2 restauración ción |
L7 restauración ción |
Actualizar Configuración file |
Actualice el firmware |
Información |
Establecer datos del dispositivo |
Ser-tes |
|
Escanear |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
Calibración |
√ |
X |
X |
√ |
√ |
X |
X |
√ |
√ |
√ |
|
Establecer inclinación |
√ |
X |
X |
√ |
√ |
X |
X |
√ |
√ |
√ |
|
Restauración L2 |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
Restauración L7 |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
| Actualizar configuración file |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
| Actualizar firmware |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
Información |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
| Establecer datos del dispositivo |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
Autoprueba |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
X: Nota 1) MIRCU no puede operar los comandos de 2 primarios respectivos simultáneamente.
Entran en conflicto entre sí y no cumplen con el estándar AISG.
Nota 2) 1 primario puede operar el comando con éxito, pero el comando enviado por otro primario no se logró.
√:Nota 1) MIRCU-S24 puede operar los comandos desde 2 primarios respectivos simultáneamente y cumplir con el estándar AISG.
Nota 2) Aunque 'Actualizar configuración File' y 'Actualizar firmware' pueden ejecutarse en el 2.° primario mientras el 1.° primario está realizando una acción, el enlace en el 1.° primario se romperá y todas las acciones se detendrán y no funcionarán.
a) escanear
MIRCU-S24 admite 2 primarios para escanear MIRCU simultáneamente. Cuando el primer primario está escaneando, el segundo primario puede escanear, calibrar, configurar la inclinación, restaurar L1/L2, actualizar la configuración file, actualice el firmware, obtenga información de MIRCU, configure los datos del dispositivo y realice una autocomprobación.
Cuando el primer primario está escaneando, si el segundo primario envía un comando a MIRCU, el impacto en el primer primario se muestra en la siguiente tabla:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Apoyo | Sin impacto |
| Establecer inclinación | Apoyo | Sin impacto |
| Restauración L2 /L7 | Apoyo | Sin impacto |
| Actualizar configuración File | Apoyo | Enlace roto |
| Actualizar firmware | Apoyo | Enlace roto |
| Obtener información | Apoyo | Sin impacto |
| Establecer datos del dispositivo | Apoyo | Sin impacto |
| Autoprueba | Apoyo | Sin impacto |
b) Calibración
MIRCU-S24 NO admite 2 primarios para realizar la calibración simultáneamente. Cuando el primer primario se está calibrando, el segundo primario puede escanear MIRCU, restaurar L1/L2, obtener información de MIRCU, establecer datos del dispositivo y realizar autopruebas, pero NO puede calibrar, establecer la inclinación, actualizar la configuración file y actualizar el firmware.
Cuando el primer primario se está calibrando, si el segundo primario envía un comando a MIRCU, el impacto en el primer primario se muestra en la siguiente tabla:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Responder "Ocupado" | Sin impacto |
| Establecer inclinación | Responder "Ocupado" | Sin impacto |
| Restauración L2 /L7 | Apoyo | Sin impacto |
| Actualizar configuración File | Responder "Ocupado" | Sin impacto |
| Actualizar firmware | Responder "Ocupado" | Sin impacto |
| Obtener información | Apoyo | Sin impacto |
| Establecer datos del dispositivo | Apoyo | Sin impacto |
| Autoprueba | Apoyo | Sin impacto |
c) Establecer inclinación
MIRCU-S24 NO admite 2 primarias para configurar la inclinación simultáneamente. Cuando el primer primario configura la inclinación, el segundo primario puede escanear MIRCU, restaurar L1/L2, obtener información de MIRCU, configurar los datos del dispositivo y la autocomprobación, pero NO puede calibrar, configurar la inclinación ni actualizar la configuración. file y actualizar el firmware.
Cuando el 1.° primario configura la inclinación, si el 2.° primario envía un comando a MIRCU, el impacto en el 1.° primario se muestra en la siguiente tabla:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Responder "Ocupado" | Sin impacto |
| Establecer inclinación | Responder "Ocupado" | Sin impacto |
| Restauración L2 /L7 | Apoyo | Sin impacto |
| Actualizar configuración File | Responder "Ocupado" | Sin impacto |
| Actualizar firmware | Responder "Ocupado" | Sin impacto |
| Obtener información | Apoyo | Sin impacto |
| Establecer datos del dispositivo | Apoyo | Sin impacto |
| Autoprueba | Apoyo | Sin impacto |
d) Restauración L2 /L7
MIRCU-S24 admite 2 primarias para restaurar L2 o L7 simultáneamente. No provocará el reinicio del hardware de todo el módulo. Cuando el primer primario está restaurando L1/L2, el segundo primario puede escanear, calibrar, configurar la inclinación, restaurar L7/L2, actualizar la configuración file, actualice el firmware, obtenga información de MIRCU, configure los datos del dispositivo y realice una autocomprobación.
e) Subir Configuración File
MIRCU-S24 NO admite 2 primarias para actualizar la configuración file simultaneamente. Cuando el primer primario está actualizando la configuración file, el 2º primario NO puede realizar ninguna operación. Se restablecerá y el enlace se desconectará.
f) Actualizar firmware
MIRCU-S24 NO admite 2 primarias para actualizar el firmware simultáneamente. Cuando el primer primario está actualizando el firmware, el segundo primario NO puede realizar ninguna operación. Se restablecerá y el enlace se desconectará.
g) Obtención de información del MIRCU
MIRCU-S24 admite 2 primarias para obtener información RET simultáneamente. Cuando el primer primario obtiene información de MIRCU, el segundo primario puede escanear, calibrar, configurar la inclinación, restaurar L1/L2, actualizar la configuración file, actualice el firmware, obtenga información de MIRCU, configure los datos del dispositivo y realice una autocomprobación.
Cuando el 1.° primario configura la inclinación, si el 2.° primario envía un comando a MIRCU, el impacto en el 1.° primario se muestra en la siguiente tabla:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Apoyo | Sin impacto |
| Establecer inclinación | Apoyo | Sin impacto |
| Restauración L2 /L7 | Apoyo | Sin impacto |
| Actualizar configuración File | Apoyo | Enlace roto |
| Actualizar firmware | Apoyo | Enlace roto |
| Obtener información | Apoyo | Sin impacto |
| Establecer datos del dispositivo | Apoyo | Sin impacto |
| Autoprueba | Apoyo | Sin impacto |
h) Establecer datos del dispositivo
MIRCU-S24 admite 2 primarias para configurar los datos del dispositivo simultáneamente. Cuando el primer primario está configurando los datos del dispositivo, el segundo primario puede escanear, calibrar, configurar la inclinación, restaurar L1/L2, actualizar la configuración file, actualice el firmware, obtenga información de MIRCU, configure los datos del dispositivo y realice una autocomprobación.
**Nota: Los datos que se pueden cambiar incluyen la fecha de instalación, la identificación del instalador, la identificación de la estación base, la identificación del sector, el rumbo de la antena (grados), la inclinación mecánica instalada (grados) y el número de serie de la antena. El número de modelo de la antena, la(s) banda(s) operativa(s) de la antena, el ancho del haz, la ganancia (dB), la inclinación máxima (grados) y la inclinación mínima (grados) NO se pueden cambiar, MIRCU-S24 responderá "Solo listo".
Cuando el 1er primario está configurando los datos del dispositivo, si el 2do primario envía un comando a MIRCU, el impacto en el 1er primario se muestra en la tabla a continuación:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Apoyo | Sin impacto |
| Establecer inclinación | Apoyo | Sin impacto |
| Restauración L2 /L7 | Apoyo | Sin impacto |
| Actualizar configuración File | Apoyo | Enlace roto |
| Actualizar firmware | Apoyo | Enlace roto |
| Obtener información | Apoyo | Sin impacto |
| Establecer datos del dispositivo | Apoyo | Sin impacto |
| Autoprueba | Apoyo | Sin impacto |
i) Autoevaluación
MIRCU-S24 admite 2 primarias para realizar autodiagnósticos simultáneamente. Cuando el primer primario está realizando una autocomprobación, el segundo primario puede escanear, calibrar, configurar la inclinación, restaurar L1/L2, actualizar la configuración file, actualice el firmware, obtenga información de MIRCU, configure los datos del dispositivo y realice una autocomprobación.
Cuando el 1.er primario está realizando una autocomprobación, si el 2.º primario envía un comando a MIRCU, el impacto en el 1.er primario se muestra en la siguiente tabla:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Apoyo | Sin impacto |
| Establecer inclinación | Apoyo | Sin impacto |
| Restauración L2 /L7 | Apoyo | Sin impacto |
| Actualizar configuración File | Apoyo | Enlace roto |
| Actualizar firmware | Apoyo | Enlace roto |
| Obtener información | Apoyo | Sin impacto |
| Establecer datos del dispositivo | Apoyo | Sin impacto |
| Autoprueba | Apoyo | Sin impacto |
Funcionamiento en modo AISG3.0
En la siguiente tabla se muestra un resumen del conflicto de operación para 2 primarias (1ra y 2da primaria) que operan MIRCU-S24:
**Nota: Todos los "√" y "X" que se muestran se relacionan principalmente con el segundo primario, lo que implica si la acción correspondiente (enumerada horizontalmente en la tabla) se puede realizar o no en el segundo primario cuando el primer primario está ejecutando un determinado comando o acción. (enumerados verticalmente en la tabla). El orden de prioridad del "principal" no es fijo y depende de qué primario realmente inicie una acción en primer lugar.
|
2nd Primario
1st Primario |
Escanear |
Calibración |
Establecer inclinación |
Reiniciar Puerto |
Reiniciar ALD |
Subir |
Descargar |
Malo Configur e |
Silbido |
|
Escanear |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
Calibración |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
|
Establecer inclinación |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
|
Restablecer puerto |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
RestablecerALD |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
Subir |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
|
Descargar |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
MALD Configurar |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
|
Silbido |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
X: Nota 1) MIRCU no puede operar los comandos de 2 primarios respectivos simultáneamente.
Entran en conflicto entre sí y no cumplen con el estándar AISG.
Nota 2) 1 primario puede operar el comando con éxito, pero el comando enviado por otro primario no se logró.
√:Nota 1) MIRCU-S24 puede operar los comandos desde 2 primarios respectivos simultáneamente y cumplir con el estándar AISG.
Nota 2) 'Cuando se ejecuta "RESETALD" en el 2.° primario cuando el 1.° primario está realizando una acción, se suspenderá toda la acción en el 1.° primario.
a) escanear
MIRCU-S24 admite 2 primarios para escanear MIRCU simultáneamente. Cuando el primer primario está escaneando, la operación en el segundo primario no se ve afectada y puede escanear, calibrar, configurar la inclinación, restablecer el puerto, restablecer ALD, cargar/descargar file, configure MALD y haga ping.
Cuando el primer primario está escaneando, si el segundo primario envía un comando a MIRCU, el impacto en el primer primario se muestra en la siguiente tabla:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Apoyo | Sin impacto |
| Establecer inclinación | Apoyo | Sin impacto |
| Restablecer puerto | Apoyo | Sin impacto |
| RestablecerALD | Apoyo | Enlace roto |
| Subir File | Apoyo | Sin impacto |
| Descargar File | Apoyo | Enlace roto |
| MALD Configurar | Apoyo | Sin impacto |
| SILBIDO | Apoyo | Sin impacto |
b) Calibrar
MIRCU-S24 NO admite 2 primarios para realizar la calibración simultáneamente. Cuando el primer primario se está calibrando, el segundo primario puede escanear, restablecer el puerto, restablecer ALD pero NO puede calibrar, configurar la inclinación, cargar/descargar file, configure MALD y haga ping.
Cuando el primer primario se está calibrando, si el segundo primario envía un comando a MIRCU, el impacto en el primer primario se muestra en la siguiente tabla:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Devolver “UsarPorOtroPuerto” | Sin impacto |
| Establecer inclinación | Devolver “UsarPorOtroPuerto” | Sin impacto |
| Restablecer puerto | Apoyo | Sin impacto |
| RestablecerALD | Apoyo | Enlace roto |
| Subir File | Devolver “UsarPorOtroPuerto” | Sin impacto |
| Descargar File | Devolver “UsarPorOtroPuerto” | Sin impacto |
| MALD Configurar | Devolver “UsarPorOtroPuerto” | Sin impacto |
| SILBIDO | Devolver “UsarPorOtroPuerto” | Sin impacto |
c) Establecer inclinación
MIRCU-S24 NO admite 2 primarias para configurar la inclinación simultáneamente. Cuando el primer primario configura la inclinación, el segundo primario puede escanear, restablecer el puerto, restablecer ALD pero NO puede calibrar, configurar la inclinación, cargar/descargar file, configure MALD y haga ping.
Cuando el 1.° primario configura la inclinación, si el 2.° primario envía un comando a MIRCU, el impacto en el 1.° primario se muestra en la siguiente tabla:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Devolver “UsarPorOtroPuerto” | Sin impacto |
| Establecer inclinación | Devolver “UsarPorOtroPuerto” | Sin impacto |
| Restablecer puerto | Apoyo | Sin impacto |
| RestablecerALD | Apoyo | Enlace roto |
| Subir File | Devolver “UsarPorOtroPuerto” | Sin impacto |
| Descargar File | Devolver “UsarPorOtroPuerto” | Sin impacto |
| MALD Configurar | Devolver “UsarPorOtroPuerto” | Sin impacto |
| SILBIDO | Devolver “UsarPorOtroPuerto” | Sin impacto |
d) Restablecer
AISG3.0 tiene 2 tipos de operaciones de reinicio: ResetPort y ResetALD. ResetPort solo restablece el par de puertos que se conectan al 1.° O 2.° primario y NO afecta el funcionamiento de otro primario. ResetALD restablece todo el módulo y se reiniciará, por lo tanto, ambos primarios se desconectarán.
e) Subir (Obtener File del módulo)
El comando de carga comienza con 'UploadStart' y termina con 'UploadEnd'. los file se transporta y carga usando 'SubirFilecomando. el apoyado file los tipos son FirmwareFile y configurarFile. El módulo no admite puertos múltiples file operación de carga simultánea, lo que significa que cuando el 1.er primario está realizando la carga, el 2.º primario estará en 'Estado de conexión restringida'.
Cuando el primer primario está cargando file, si el segundo primario envía un comando a MIRCU, el impacto en el primer primario se muestra en la tabla a continuación:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Devuelve "Estado incorrecto" | Sin impacto |
| Establecer inclinación | Devuelve "Estado incorrecto" | Sin impacto |
| Restablecer puerto | Apoyo | Sin impacto |
| RestablecerALD | Apoyo | Enlace roto |
| Subir File | Devuelve "Estado incorrecto" | Sin impacto |
| Descargar File | Devuelve "Estado incorrecto" | Sin impacto |
| MALD Configurar | Devuelve "Estado incorrecto" | Sin impacto |
| SILBIDO | Devuelve "Estado incorrecto" | Sin impacto |
f) Descargar (Descargar file al módulo)
El file El comando de descarga comienza con 'DownloadStart' y termina con 'DownloadEnd'. los file es transportado y descargado usando 'DescargarFilecomando. el apoyado file los tipos son FirmwareFile y configurarFile. El módulo no admite puertos múltiples file operación de descarga simultánea, lo que significa que cuando el 1er puerto principal está realizando la descarga, el segundo puerto principal estará cerrado y no se podrá realizar ninguna operación.
g) MALD Configurar
Cuando se realiza la configuración MALD en el módulo, se puede configurar la autoridad de acceso del puerto del módulo a cada una de las subunidades de la antena. Cuando la operación de configuración MALD se realiza en el primer primario, el segundo primario estará en
'Estado de conexión restringida'.
Cuando el primer primario está configurando MALD, si el segundo primario envía un comando a MIRCU, el impacto en el primer primario se muestra en la tabla a continuación:
| 2nd Acción primaria | Si MIRCU Soporte | Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Devuelve "Estado incorrecto" | Sin impacto |
| Establecer inclinación | Devuelve "Estado incorrecto" | Sin impacto |
| Restablecer puerto | Apoyo | Sin impacto |
| RestablecerALD | Apoyo | Enlace roto |
| Subir File | Devuelve "Estado incorrecto" | Sin impacto |
| Descargar File | Devuelve "Estado incorrecto" | Sin impacto |
| MALD Configurar | Devuelve "Estado incorrecto" | Sin impacto |
| SILBIDO | Devuelve "Estado incorrecto" | Sin impacto |
h) hacer ping
Cuando el 1er primario está realizando una operación PING, el 2do primario estará en 'Estado de conexión restringida'. Consulte el protocolo AISG3.0 para obtener detalles sobre la operación PING. Cuando el primer primario está realizando ping, si el segundo primario envía un comando a MIRCU, el impacto en el primer primario se muestra en la siguiente tabla:
|
2nd Acción primaria |
Si MIRCU Soporte |
Impacto en 1st Primario |
| Escanear | Apoyo | Sin impacto |
| Calibración | Devuelve "Estado incorrecto" | Sin impacto |
| Establecer inclinación | Devuelve "Estado incorrecto" | Sin impacto |
| Restablecer puerto | Apoyo | Sin impacto |
| RestablecerALD | Apoyo | Enlace roto |
| Subir File | Devuelve "Estado incorrecto" | Sin impacto |
| Descargar File | Devuelve "Estado incorrecto" | Sin impacto |
| MALD Configurar | Devuelve "Estado incorrecto" | Sin impacto |
| SILBIDO | Devuelve "Estado incorrecto" | Sin impacto |
Instalación y Conexión MIRCU
Requisito de instalación
Requisito del cable de control
- Conector del cable de control:
Cumple con los requisitos del conector IEC60130-9 de 8 pines. El extremo del cable está compuesto por conectores macho y hembra, el conector y el núcleo del cable cumplen con los requisitos estándar de la interfaz AISG. - Cable:
Composición de 5 núcleos con cable de blindaje de capa protectora de metal y plástico, requisitos de diámetro del núcleo: 3 × 0.75 mm + 2 × 0.32 mm. - Clase de protección:
IP65
Fuente de alimentación
Potencia de entrada MIRCU: CC +10 V ~ +30 V
Herramientas de instalación
Llave dinamométrica de extremo abierto de 32 mm x 1.
Instalación de MIRCU-S24
Pasos y métodos de instalación de MIRCU-S24
a) Como se muestra en la Figura 2, el logotipo "AISG OUT" en la cubierta de la antena debe estar alineado con MIRCU "IN" y "OUT", luego inserte MIRCU en la ranura de montaje de la antena.
 b) Como se muestra en la Figura 3, apriete los tornillos en MIRCU con un destornillador de ranura.
b) Como se muestra en la Figura 3, apriete los tornillos en MIRCU con un destornillador de ranura.  c) Como se muestra en la Figura 4, conecte el cable de control al conector AISG ubicado en la parte inferior de la MIRCU y apriete el conector.
c) Como se muestra en la Figura 4, conecte el cable de control al conector AISG ubicado en la parte inferior de la MIRCU y apriete el conector.
 d) Si es necesario conectar más de una MIRCU, se puede usar el método de cascada en cadena como se muestra en la Figura 5.
d) Si es necesario conectar más de una MIRCU, se puede usar el método de cascada en cadena como se muestra en la Figura 5. Figura 5 Diagrama esquemático de cascada de cadena margarita MIRCU múltiple
Figura 5 Diagrama esquemático de cascada de cadena margarita MIRCU múltiple
**Nota: Los cables de control y conectores MIRCU en ambos extremos eran conector Macho y Hembra. Conector macho MIRCU utilizado para recibir la señal de entrada y conectar con el conector hembra de los cables de control; Conector hembra MIRCU usado para transmitir señal de salida y cascada en serie a otro MIRCU usando conector de cable macho. Los cables de control de la PCU solo se pueden conectar al conector macho de MIRCU.
e) A prueba de agua: En primer lugar, envuelva 3 capas de cinta impermeable, luego envuelva 3 capas de cinta aislante, sujetadas con bridas en ambos extremos.
Conexión entre MIRCU, PCU y Sistema de Antenas
La conexión entre MIRCU, PCU y las conexiones del sistema de antena se muestran en la Figura 6. Hay 3 conexiones, a saber:
Figura 6 (a): MIRCU conectado directamente con la PCU a través del cable de control;
Figura 6(b): MIRCU conectado con el terminal del sistema de antena SBT (Smart Bias-T), PCU y el aparato de la estación base conectado al final de SBT, la señal de control transmitida a través del alimentador de RF.
Figura 6(c): MIRCU conectado con la interfaz AISG habilita TMA, PCU y el aparato de la estación base conectado al final de SBT, la señal de control transmitida a través del alimentador de RF.  Mapeo de MIRCU a Phase Shifter
Mapeo de MIRCU a Phase Shifter
El MIRCU existente de Comba puede satisfacer de 1 a 8 controles de cambio de fase RET, y se actualizará para admitir hasta 20 controles de cambio de fase en un futuro cercano a través de la actualización del firmware, que se espera que esté listo para el segundo trimestre de 2. Todo el control y el chip del controlador están integrados en un solo Módulo MIRCU. Las especificaciones relativas se muestran en la Tabla 2021.
| Parámetro
Producto |
No. de unidad de control de conducción de motor |
Antena RET adecuada |
Modo de instalación |
|
MIRCU-S24 |
2 |
Antena RCU RET integrada de 1 a 8 bandas de frecuencia. Actualizable a 20 bandas de frecuencia en el futuro. |
Conectar y usar |
Tabla 2 MIRCU en relación a la Idoneidad de la Antena
El producto Comba MIRCU, como se muestra en la Figura 7 y la Figura 8, emplea el uso de un enchufe para realizar la función plug-and-play mediante la cual el MIRCU se puede instalar o desinstalar fácilmente. Mejora en gran medida la fiabilidad del producto en términos de conexión y utilización. Además, el mantenimiento se simplifica enormemente.  Cada unidad de controlador/motor viene con su propio número de serie. Para la Figura 9 a continuación, se mostrarán 8 conjuntos de números de serie en la PCU cuando esté conectado.
Cada unidad de controlador/motor viene con su propio número de serie. Para la Figura 9 a continuación, se mostrarán 8 conjuntos de números de serie en la PCU cuando esté conectado.  Cable de Control MIRCU, Cables de Protección contra Rayos y Puesta a Tierra
Cable de Control MIRCU, Cables de Protección contra Rayos y Puesta a Tierra
Requisitos de cable de control, protección contra rayos y puesta a tierra
El cable de control MIRCU se puede conectar a través de SBT o TMA (como se muestra en la Figura 6 (b), (c)), normalmente el cable de control será corto y no más de 2 m, la protección de iluminación y la conexión a tierra se implementarán a lo largo del alimentador de RF y, por lo tanto, No es necesario que el cable de control realice la protección contra rayos y la puesta a tierra nuevamente.
Sin embargo, si la MIRCU y el cable de control están conectados como se muestra en la Figura 6 (a), por lo que el cable de control se conecta directamente a la RCU, entonces es necesario que el control del cable continúe con el requisito de protección contra rayos y conexión a tierra. Detalles de la siguiente manera:
- a) Los cables de control que se conectan a la antena de la estación base deben estar dentro del alcance de protección de las terminales aéreas. Las terminales aéreas deberán establecer deflectores especiales de corriente de rayo, los materiales adecuados son acero plano galvanizado de 4 mm x 40 mm.
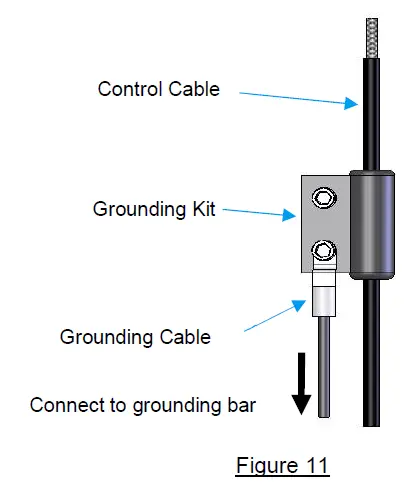
- b) La cubierta metálica de los cables de control debe ser clamp al kit de conexión a tierra dentro de 1 m de la antena, 1 m dentro de la bandeja de cables en la parte inferior de la torre y 1 m antes de ingresar al refugio de la estación base. Asegúrese de que el cable de conexión a tierra esté instalado correctamente, la ventana del alimentador de la habitación del refugio debe estar cerca del suelo y conectarse correctamente a la barra de conexión a tierra que conduce al suelo. (Ver Figura 10)
 c) La cubierta metálica de los cables de control se conecta al kit de puesta a tierra como se muestra en la Figura 11.
c) La cubierta metálica de los cables de control se conecta al kit de puesta a tierra como se muestra en la Figura 11.
Procedimiento de instalación del kit de puesta a tierra
- a) Prepare el kit de tierra, como se muestra en la Figura 12 1a.
- b) Limpie la cubierta plástica de los cables de control, cortando la cubierta plástica con una herramienta pelacables adecuada, exponga la cubierta trenzada de metal del cable de control, con una longitud de aproximadamente 22 mm, como se muestra en la Figura 12 1b.
- c) Quitar la lámina de protección del kit de tierra, clampColoque el kit de puesta a tierra alrededor del cable de control y alinéelo con la línea rayada como se muestra en la Figura 13.
- d) Apriete los tornillos del kit de puesta a tierra, como se muestra en la Figura 14.
- e) Conecte y apriete el cable de puesta a tierra en la barra de puesta a tierra que se encuentra en la parte inferior de la torre.
**Nota: Los cables de control deben estar en posición vertical mientras clampcon kit de puesta a tierra.

Transporte y almacenamiento
Transporte
El equipo puede transportarse en automóvil, tren, barco, avión u otros vehículos de transporte. Evite la lluvia, evite vibraciones e impactos excesivos durante el transporte. Manipule con cuidado durante la carga y descarga, evite estrictamente caídas desde altura y otras manipulaciones bruscas.
Almacenamiento
El equipo empaquetado debe colocarse en un área seca y ventilada, con aire ambiente sin gases ácidos, alcalinos y otros gases corrosivos. El apilamiento de cajas deberá cumplir con las especificaciones de la caja. El período de almacenamiento no debe exceder los 2 años, el bien almacenado durante más de 2 años deberá pasar una prueba de reinspección antes de su uso.
Precaución y nota
Precaución
Precaución: Se advierte al usuario que los cambios o modificaciones no aprobados expresamente por la parte responsable del cumplimiento podrían anular la autoridad del usuario para operar el equipo.
Este dispositivo cumple con la Parte 15 de las Normas de la FCC. Su funcionamiento está sujeto a las dos condiciones siguientes: (1) este dispositivo no puede causar interferencias perjudiciales y (2) este dispositivo debe aceptar cualquier interferencia que reciba, incluidas las interferencias que puedan causar un funcionamiento no deseado.
Nota
NOTA: Este equipo ha sido probado y se ha determinado que cumple con los límites establecidos para dispositivos digitales de Clase B, de conformidad con la Parte 15 de las Normas de la FCC. Estos límites están diseñados para proporcionar una protección razonable contra interferencias perjudiciales en una instalación residencial. Este equipo genera, utiliza y puede emitir energía de radiofrecuencia y, si no se instala y utiliza de acuerdo con las instrucciones, puede causar interferencias perjudiciales en las comunicaciones por radio. Sin embargo, no existe garantía de que no se produzcan interferencias en una instalación en particular.
Si este equipo causa interferencias dañinas en la recepción de radio o televisión, lo cual se puede determinar encendiendo y apagando el equipo, se recomienda al usuario que intente corregir la interferencia mediante una o más de las siguientes medidas:
- Reorientar o reubicar la antena receptora.
- Aumente la separación entre el equipo y el receptor.
- Conecte el equipo a una toma de corriente de un circuito diferente al que está conectado el receptor.
Documentos / Recursos
 |
Mando a distancia interno múltiple Comba MIRCU-S24 [pdf] Manual del usuario MIRCU-S24, MIRCUS24, PX8MIRCU-S24, PX8MIRCUS24, MIRCU-S24 Unidad de control remoto interna múltiple, Unidad de control remoto interna múltiple, Unidad de control remoto, Unidad de control |



